Theorems on probability: The probability of the event is the chance of its occurrence. Theorems of probability tell the rules and conditions related to the...
Last Modified 25-01-2025

Lead with Courage, Learn with Purpose! Celebrate Parakram Diwas with learning that
matters
Discounts on all plans await!

Theorems on Probability: Introduction, Theorems, Properties, Solved Examples
January 25, 2025
Probability Density Function: Definition, Formula, Applications, Solved Examples
January 25, 2025
Exponents and Surds: Overview, Principles, Examples
January 24, 2025
Use of Exponents to Express Small Numbers in Standard Form: Method, Examples
January 24, 2025
Taxes on Sale of an Item: Definition, Diagram, Types and Examples
January 24, 2025
Neutralisations in Everyday Life: Know Details
January 24, 2025
Sound: Characteristics, Reflection of Sound & Hearing Range
January 24, 2025
Biology and Its Importance – Definition, Branches & Significance
January 24, 2025
Introduction to Chemistry: Organic Chemistry, Analytical Chemistry
January 24, 2025
Formation of Differential Equation: Meaning, Classification, Order
January 24, 2025
Basics of vectors: There are two types of physical quantities – scalar quantities and vector quantities. Scalar quantities, or scalars, have just magnitude and does not have any fixed orientation in space. Examples of scalar quantities are mass, density, work, temperature, and density. We can assign a real number to a scalar quantity to indicate its magnitude.
Vector quantities are those quantities that have both magnitude and direction. Examples of vector quantities are displacement, acceleration, velocity, weight, and force. Let us learn the basics of vectors in this article.

Directed rays are used to depict vectors, with the length of the ray equaling the magnitude of the vector and the direction of the arrow at one end emphasizing the vector’s direction.
A vector, denoted by \(\overrightarrow {PQ}\) is determined by two points \(P,\,Q\) such that the magnitude of the vector is the length of the line \(PQ\) and its direction is from \(P\) to \(Q\). The point \(P\) is called the initial point of the vector \(\overrightarrow {PQ}\) and \(Q\) is called the terminal point or tip.
Vectors are also denoted by the name of the ray, such as \(\vec a,\,\vec b\) and \(\vec c\).
The modulus, or module, or magnitude of a vector \(\vec a\) is the positive number which is the measure of its length. It is denoted by \(|\vec a|\).
The \(|\vec a|\) of a vector \(\vec a\) is sometimes written as \(a\)
Depending on the magnitude and/or direction, vectors can be classified into different types.
If two vectors \(\vec a\) and \(\vec b\) are represented in magnitude and direction by the two adjacent sides of a parallelogram, then their sum \(\vec c\) is represented by the diagonal of the parallelogram which is co-initial with the given vectors.
Construct \(\overrightarrow {PR}\) parallel to \(\overrightarrow {OQ}\) and \(\overrightarrow {QR}\) parallel to \(\overrightarrow {OP}\).
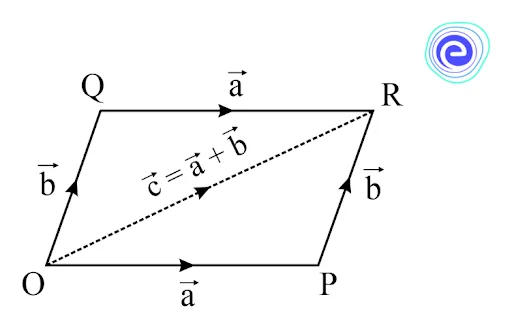
Mathematically, we have
\(\overrightarrow {OP} + \overrightarrow {OQ} = \overrightarrow {OR}\)
\( \Rightarrow \vec a + \vec b = \vec c\)
Now, \(\overrightarrow {PR} = \overrightarrow {OQ} = \vec b\)
Therefore, in triangle \(OPR\) we obtain
\(\overrightarrow {OP} + \overrightarrow {PR} = \overrightarrow {OR}\)
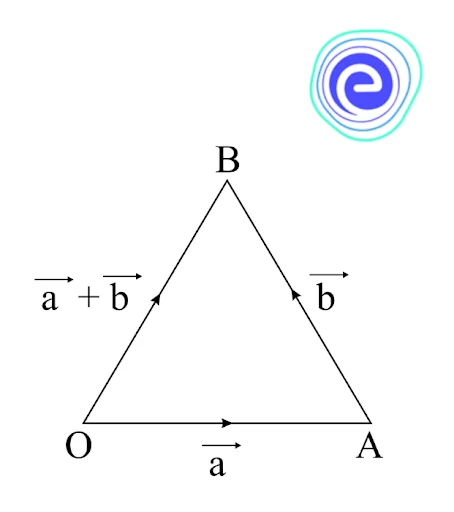
This result shows that if two vectors are represented in magnitude and direction by the two sides of a triangle taken in the same order, then their sum is represented by the third side taken in the reverse order. This is called the triangle law of addition of vectors.
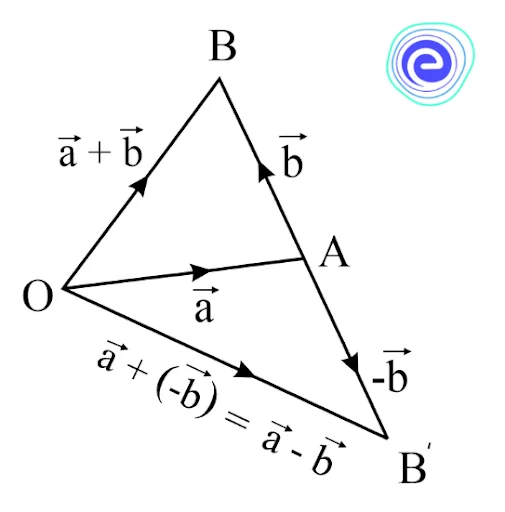
If \(\vec a\) and \(\vec b\) are two vectors, then the subtraction of \(\vec b\) from \(\vec a\) is defined as the vector sum of \(\vec a\) and \( – \vec b\), and it is denoted as
\(\vec a – \vec b = \vec a + ( – \vec b)\)
Thus, to subtract vector \(\vec b\) from vector \(\vec a\), we reverse the direction of \(\vec b\) and add it to \(\vec a\) as shown in the figure given below.
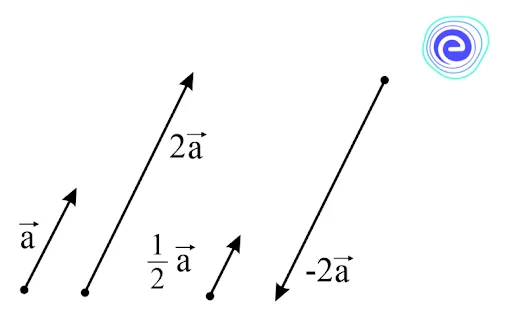
Suppose we have a vector \(\vec a\), then if this vector is multiplied by a scalar quantity, \(m\), we get a new vector with the magnitude as \(|m\vec a|\), and the direction remains the same as \(\vec a\) if \(m\) is positive and if \(m\) is negative then the direction of \(m\) becomes just opposite of the direction of \(\vec a\).
From the above definition, it is evident that,
\(\vec a = |\vec a|\hat a \Rightarrow \hat a = \frac{1}{{|\vec a|}}\vec a\)
It is also evident that two vectors \(\vec a\) and \(\vec b\) are collinear or parallel if \(\vec a = m\vec b\) for some non-zero scalar \(m\).
Geometric visualization of the multiplication of a vector by a scalar is given in the following figure:
For vectors \(\vec a,\,\vec b\) and scalars \(m,\,n\), we have
The vectors \(m( – \vec a),\,( – m)\vec a\) and \( – (m\vec a)\) are all equal in magnitude which is equal to \(|m||\vec a|\) and have the same direction which is opposite to that of \(\vec a\). Therefore, these vectors are equal to each other.
2. \(( – m)( – \vec a) = m\vec a\)
Clearly, \(( – m)( – \vec a) = ( – m)\vec b\), where \(\vec b = – \vec a\)
\( \Rightarrow ( – m)( – \vec a) = – (m\vec b)\quad [\because ( – m)\vec b = – (m\vec b)]\)
\( \Rightarrow ( – m)( – \vec a) = – \{ m( – \vec a)\} = – \{ – (m\vec a)\} \quad [\because m( – \vec a) = – (m\vec a)]\)
\( \Rightarrow ( – m)( – \vec a) = m\vec a\quad [\because – ( – \vec a) = \vec a]\)
Hence, \(( – m)( – \vec a) = m\vec a\)
3. \(m(n\vec a) = (mn)\vec a = n(m\vec a)\)
For \(mn > 0\), the vectors \(m(n\vec a),\,(mn)\vec a\), and \(n(m\vec a)\) are of equal magnitude i.e., \(mn|\vec a|\), and their direction is same as that of \(\vec a\).
And, for \(mn < 0\) the magnitude of the vectors \(m(n\vec a),\,(mn)\vec a\), and \(n(m\vec a)\) are \( – mn|\vec a|\), and its direction is opposite to that of \(\vec a\).
Therefore, these vectors are equal to each other.
4. \((m + n)\vec a = m\vec a + n\vec a\)
The multiplication of the addition of scalars by a vector is equal to the sum of the products obtained by the multiplication of each scalar by the vector.
5. \(m(\vec a + \vec b) = m\vec a + m\vec b\)
The distributive property of scalar multiplication of vectors asserts that the sum of the products generated by multiplying each vector by the scalar equals the multiplication of addition of vectors by the scalar. Multiplication is distributed across vector addition in this fashion.
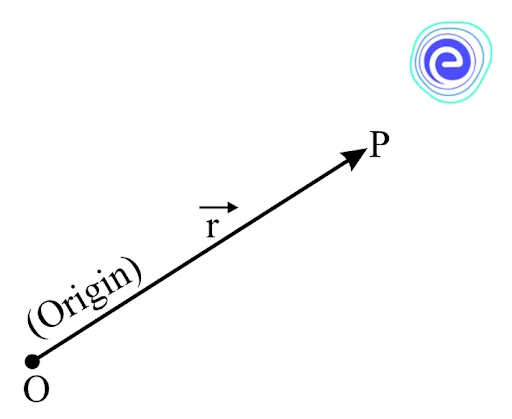
When a point \(O\) is established as the origin in space (or plane), and \(P\) is any point, the position vector of \(P\) with respect to \(O\) is referred to as \(\overrightarrow {OP} \). When we state \(P\) is the point \(\vec r\), we imply that \({P^\prime }s\) position vector with respect to some origin \(O\) is \(\vec r\).
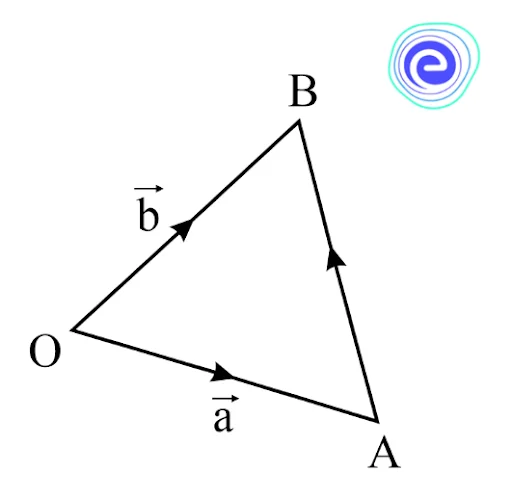
Let \(\vec a\) and \(\vec b\) be the position vectors of points \(A\) and \(B\) respectively. Then, \(\overrightarrow {OA} = \vec a,\,\overrightarrow {OB} = \vec b\).
In \(\Delta OAB\), we have,
\(\overrightarrow {OA} + \overrightarrow {AB} = \overrightarrow {OB}\)
\( \Rightarrow \overrightarrow {AB} = \overrightarrow {OB} – \overrightarrow {OA} = \vec b – \vec a\)
\( \Rightarrow \overrightarrow {AB} = \left( {{\rm{Position}}\,{\rm{Vector}}\,{\rm{of}}\,B} \right) – \left( {{\rm{Position}}\,{\rm{Vector}}\,{\rm{of}}\,A} \right)\)
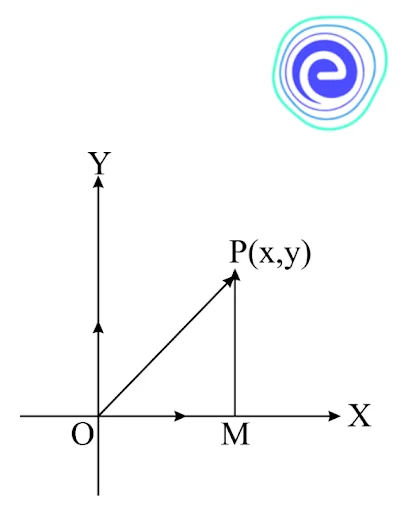
Let \(P(x,\,y)\) be a point in a plane with reference to \(OX\) and \(OY\) as the coordinate axes as shown in the figure given below.
Here, \(OM = x,\,PM = y\). Let \(\hat i,\,\hat j\) be unit vectors along \(OX\) and \(OY\) respectively. Then, \(\overrightarrow {OM} = x\hat i\) and \(\overrightarrow {MP} = y\hat j\). Vectors \(\overrightarrow {OM}\) and \(\overrightarrow {MP}\) are known as the components of \(\overrightarrow {OP}\), along \(x\)-axis and \(y\)-axis respectively.
Now, \(\overrightarrow {OP} = \overrightarrow {OM} + \overrightarrow {MP}\)
\( \Rightarrow \overrightarrow {OP} = x\hat i + y\hat j\)
Let \(\overrightarrow {OP} = r\)
Then, \(\vec r = x\hat i + y\hat j\)
Applying Pythagoras Theorem in \(\Delta OMP\), we get,
\(O{P^2} = O{M^2} + M{P^2}\)
\( \Rightarrow OP = \sqrt {{x^2} + {y^2}} \)
\( \Rightarrow |\vec r| = \sqrt {{x^2} + {y^2}} \)
Thus, if a point \(P\) in a plane has coordinates \((x,\,y)\), then \(\overrightarrow {OP} = x\hat i + y\hat j\), and \(|\overrightarrow {OP}| = \sqrt {{x^2} + {y^2}} \)
Let \(P(x,\,y,\,z)\) be a point in space with reference to \(OX,\,OY\) and \(OZ\) as the coordinate axes. Then \(OA = x,\,OB = y\), and \(OC = z\).
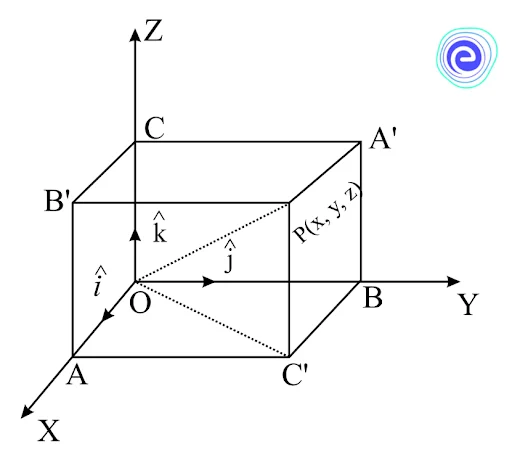
Let \(\hat i,\,\,\hat j,\,\hat k\) be unit vectors along \(OX,\,OY\), and \(OZ\) respectively.
Then, \(\overrightarrow {OA} = x\hat i,\,\,\overrightarrow {OB} = y\hat j\) and \(\overrightarrow {OC} = z\hat k\)
From the above figure, we have,
\(\overrightarrow {B {C^\prime }} = \overrightarrow {OA} = x\hat i,\,\overrightarrow {{{C^\prime }} P} = \overrightarrow {OC} = z\hat k\)
Now, \(\overrightarrow {OP} = \overrightarrow {O {C^\prime }} + \overrightarrow {{{C^\prime }} P}\)
\(\overrightarrow {OP} = \overrightarrow {OB} + \overrightarrow {B {C^\prime }} + \overrightarrow {{{C^\prime }} P}\)
\( \Rightarrow \overrightarrow {OP} = \overrightarrow {OA} + \overrightarrow {OB} + \overrightarrow {OC}\)
\( \Rightarrow \overrightarrow {OP} = x\hat i + y\hat j + z\hat k\)
If \(\overrightarrow {OP} = \vec r\), then \(\vec r = x\hat i + y\hat j + z\hat k\)
Thus, the position vector of a point \(P(x,\,y,\,z)\) in space is given by \(\vec r = x\hat i + y\hat j + z\hat k\).
Now, \(O{P^2} = O{C^{\prime 2}} + {C^\prime }{P^2}\)
\( \Rightarrow O{P^2} = \left( {O{B^2} + B{C^{\prime 2}}} \right) + {C^\prime }{P^2}\)
\( \Rightarrow O{P^2} = \left( {O{B^2} + O{A^2}} \right) + O{C^2}\)
\( \Rightarrow O{P^2} = {x^2} + {y^2} + {z^2}\)
\( \Rightarrow OP = \sqrt {{x^2} + {y^2} + {z^2}} \)
\( \Rightarrow |\vec r| = \sqrt {{x^2} + {y^2} + {z^2}} \)
Thus, if a point \(P\) in space has coordinates \((x,\,y,\,z)\), then its position vector \(\vec r\) is \(x\hat i + y\hat j + z\hat k\), and \(|\vec r| = \sqrt {{x^2} + {y^2} + {z^2}} \).
For any two vectors \(\vec a = {a_1}\hat i + {a_2}\hat j + {a_3}\hat k\) and \(\vec b = {b_1}\hat i + {b_2}\hat j + {b_3}\hat k\), we define
Q.1. Find a unit vector parallel to the vector \( – 3\hat i + 4\hat j\).
Ans: Let \(\vec a = – 3\hat i + 4\hat j\). Then, \(|\vec a| = \sqrt {{{( – 3)}^2} + {{(4)}^2}} = 5\)
Therefore, unit vector parallel to \(\vec a = \hat a = \frac{{\vec a}}{{|\vec a|}} = \frac{1}{5}( – 3\hat i + 4\hat j)\)
\(\hat a = – \frac{3}{5}\hat i + \frac{4}{5}\hat j\)
Q.2. If \(\vec a\) is a position vector whose tip is \((1,\, – 3)\). Find the coordinates of the point \(B\) such that \(\overrightarrow {AB} = \vec a\). If \(A\) has coordinates \(( – 1,\,5)\).
Ans: Let \(0\) be the origin and let \(P(1,\, – 3)\) be the tip of the position vector \(\vec a\). Then, \(\vec a = \overrightarrow {OP} = \hat i – 3\hat j\).
Let the coordinates of \(B\) be \((x,\,y)\), and \(A\) has coordinates \(( – 1,\,5)\).
\(\therefore \,\overrightarrow {AB} = \) Position Vector of \(B – \) Position Vector of \(A\).
\( \Rightarrow \overrightarrow {AB} = (x\hat i + y\hat j) – ( – \hat i + 5\hat j)\)
\( \Rightarrow \overrightarrow {AB} = (x + 1)\hat i + (y – 5)\hat j\)
Now, \(\overrightarrow {AB} = \vec a\)
\( \Rightarrow (x + 1)\hat i + (y – 5)\hat j = \hat i – 3\hat j\)
\( \Rightarrow x + 1 = 1\) and \(y – 5 = – 3\)
\( \Rightarrow x = 0\) and \(y = 2\)
Q.3. If the position vector \(\vec a\) of a point \((12,\,n)\) is such that \(|\vec a| = 13\) find the value of \(n\).
Ans: The position vector of the point \((12,\,n)\) is \(12\hat i + n\hat j\)
\(\therefore \,\vec a = 12\hat i + n\hat j\)
Now, \(|\vec a| = \sqrt {{{12}^2} + {n^2}} = 13\)
\(\therefore \,13 = \sqrt {{{12}^2} + {n^2}} \)
\( \Rightarrow 169 = 144 + {n^2}\)
\( \Rightarrow {n^2} = 25\)
\( \Rightarrow n = \pm 5\)
Q.4. For any two vectors \(\vec a\) and \(\vec b\), prove that \(|\vec a + \vec b| \le |\vec a| + |\vec b|\).
Ans: We have the following cases
Case 1: When \(\vec a,\,\vec b\) are non-collinear vectors:
Let the vectors \({\vec a}\) and \({\vec b}\) be represented by sides \(\overrightarrow {OA}\) and \(\overrightarrow {AB}\) of a triangle \(OAB.\) Then
\(\overrightarrow {OA} + \overrightarrow {AB} = \overrightarrow {OB}\) [By triangle law of vector addition]
\( \Rightarrow \vec a + \vec b = \overrightarrow {OB}\)
Since the sum of two sides of a triangle is always greater than the third side. Therefore, in \(\Delta OAB\), we have
\(OA + AB > OB\)
\( \Rightarrow |\overrightarrow {OB}| < |\overrightarrow {OA}| + |\overrightarrow {AB}|\)
\( \Rightarrow |\vec a + \vec b| < |\vec a| + |\vec b|\)
Case 2: When \(\vec a,\,\vec b\) are collinear vectors:
Let \(\overrightarrow {OA} = \vec a,\,\overrightarrow {AB} = \vec b\). Then, \(\vec a + \vec b = \overrightarrow {OA} + \overrightarrow {AB} = \overrightarrow {OB}\)
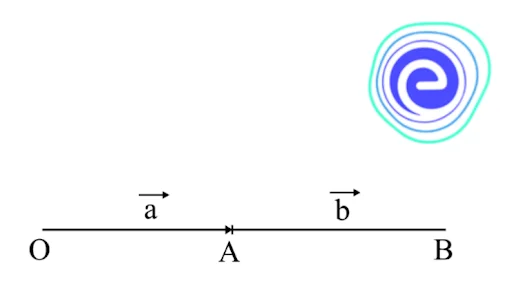
Clearly, \(OA = |\vec a|,\,AB = |\vec b|\) and \(OB = |\vec a + \vec b|\)
Now, \(OB = OA + AB\)
\( \Rightarrow |\overrightarrow {OB}| = |\overrightarrow {OA}| + |\overrightarrow {AB}|\)
\( \Rightarrow |\vec a + \vec b| = |\vec a| + |\vec b|\)
Hence, proved.
Q.5. Find the sum of vectors \(\vec a = \hat i – 2\hat j + \hat k,\,\vec b = – 2\hat i + 4\hat j + 5\hat k\) and \(\vec c = \hat i – 6\hat j – 7\hat k\).
Ans: Given: \(\vec a = \hat i – 2\hat j + \hat k,\,\vec b = – 2\hat i + 4\hat j + 5\hat k\) and \(\vec c = \hat i – 6\hat j – 7\hat k\)
Now, \(\vec a + \vec b + \vec c = (\vec a + \vec b) + \vec c\)
\( = \{ (\hat i – 2\hat j + \hat k) + ( – 2\hat i + 4\hat j + 5\hat k)\} + (\hat i – 6\hat j – 7\hat k)\)
\( = \{ (1 – 2)\hat i + ( – 2 + 4)\hat j + (1 + 5)\hat k\} + (\hat i – 6\hat j – 7\hat k)\)
\( = ( – \hat i + 2\hat j + 6\hat k) + (\hat i – 6\hat j – 7\hat k)\)
\( = ( – 1 + 1)\hat i + (2 – 6)\hat j + (6 – 7)\hat k\)
\(\therefore \,\vec a + \vec b + \vec c = 0\hat i – 4\hat j – \hat k\)
In this article we have learnt about the basics of vectors. We learnt that vectors are physical quantities which have both magnitude and a direction. A vector, denoted by \(\overrightarrow {PQ}\) is determined by two points \(P\) and \(Q\) such that the magnitude of the vector is the length of the straight line \(PQ\) and its direction is from \(P\) to \(Q\). Also, we have learned the meaning of different types of vectors, parallelogram law of vector addition, multiplication of a vector by a scalar and their properties. If a point \(P\) in a plane has coordinates \((x,\,y)\), then \(\overrightarrow {OP} = x\hat i + y\hat j\), and \(|\overrightarrow {OP}| = \sqrt {{x^2} + {y^2}} \). We have also learnt the addition, subtraction, and multiplication of a vector by a scalar in terms of its components.
Methods for Addition of Vectors
Q.1. What are the different types of vectors?
Ans: The different types of vectors are
Q.2. What are components of a vector?
Ans: Let \(P(x,\,y)\) be a point in a plane with reference to \(OX\) and \(OY\) as the coordinate axes.
Then, the components of \(\overrightarrow {OP}\) along \(x\)-axis is a vector \(x\hat i\), whose magnitude is \(|x|\) and direction is along \(OX\) or \(O{X^\prime }\) according as \(x\) is positive or negative.
Similarly, the components of \(\overrightarrow {OP}\) along \(y\)-axis is a vector \(y\hat j\), whose magnitude is \(|y|\) and whose direction is along \(OY\) or \(O{Y^\prime }\) according as \(y\) is positive or negative.
Q.3. What is a resultant vector?
Ans: The resulting vector is formed by adding two or more vectors while adhering to the vector addition principles. Suppose two vectors are represented in magnitude and direction by the two sides of a triangle taken in the same order. In that case, their total (or resultant) is represented by the third side taken in the opposite order, according to the triangle law of vector addition.
Q.4. What is the magnitude of a vector?
Ans: The modulus, or module, or magnitude of a vector \(\vec a\) is the positive number, which is the measure of its length and is denoted by \(|\vec a|\). If \(\vec a = {a_1}\hat i + {a_2}\hat j\) then \(|\vec a| = \sqrt {a_1^2 + a_2^2} \)
Q.5. How many vector quantities are there?
Ans: There are only six vector quantities: